The Reality of Cobot Implementation: A Strategic Guide to Informed Automation

At Arimation Robotics, our team brings over 150 years of combined experience in custom automation to every project. We are passionate about more than just building machines; we are dedicated to educating our partners on the evolving trends in our industry.
Recently, we were approached to share our perspective on the use of Cobots (collaborative robots) in manufacturing. While the modern aesthetic and collaborative promise of these systems are compelling, a successful implementation requires looking past the marketing to understand the technical realities of the factory floor.
The Origins of Collaboration
The "Cobot" was originally conceived as a solution for ergonomic safety rather than autonomous production. Patented in 1997 by professors at Northwestern University, the first cobots were designed to assist automotive workers with heavy lifting. Unlike the autonomous systems of today, these early versions were often "passive"—they relied on human strength for motion while the computer provided steering and guidance.
The transition to the modern autonomous cobot was made possible by Power and Force Limiting (PFL) technology. PFL is a specific safety standard where the robot is equipped with internal sensors designed to detect resistance. When the system senses a force exceeding a pre-set threshold, it is programmed to stop immediately. While this capability allows for "cageless" operation, it is important to remember that this safety comes at a direct cost to performance: to remain within safe force limits, these robots must operate at significantly lower speeds and carry lighter payloads than their traditional counterparts.
While the early prototypes established the mechanical possibility of collaboration, it was the formalization of international safety standards in the mid-2010s that truly launched the cobot into the mainstream. The release of ISO/TS 15066 provided the first defined "pain-onset thresholds" for human-robot contact, giving engineers a mathematical framework for PFL settings.
This era also saw the "Lego-fication" of robotics. Manufacturers began replacing complex code with graphic-user-interfaces (GUIs) and tablet-based "drag-and-drop" programming. This made robots look and feel like consumer electronics, fostering a belief that industrial automation had finally become "plug-and-play." However, while the software became more approachable, the industrial requirements for precision, safety validation, and mechanical reliability remained as complex as ever.
Strength in the Right Context
Cobots offer undeniable advantages when applied to the right task. They are not a universal replacement for traditional automation, but they excel in specific environments:
Shared Workspaces: Their PFL design allows them to work in proximity to personnel, reducing the need for traditional perimeter guarding in specific, low-energy applications.
Low-Speed Support: They are excellent for professional service automation or secondary assembly tasks where high-speed throughput isn't the primary goal.
Ease of Deployment: For a "high-mix, low-volume" shop, the simplified GUI can lower the initial barrier to entry for basic, lightweight tasks.
Medical Device Use Cases: Choosing the Right Tool
The Cobot Fit: Secondary Packaging
In a cramped sterile cleanroom environment, a medical device firm needs to palletize light boxes of orthopedic implants at a rate of about a half-dozen boxes per minute. Space is limited, and technicians must frequently enter the zone to replenish materials. Here, a cobot excels because its PFL capability allows it to stop safely if a technician brushes against it, eliminating the need for bulky safety fences in a cramped cleanroom.
The Traditional Fit: High-Speed Precision Assembly
Conversely, consider a high-volume line assembling insulin delivery pens. The process requires a cycle time under three seconds and involves hazardous Class 4 lasers for marking components. A traditional robot is the only logical choice. A cobot cannot match the speed, and because the laser itself poses a major safety risk, the entire process must be isolated in a light-tight, interlocked enclosure regardless of the robot's collaborative rating.
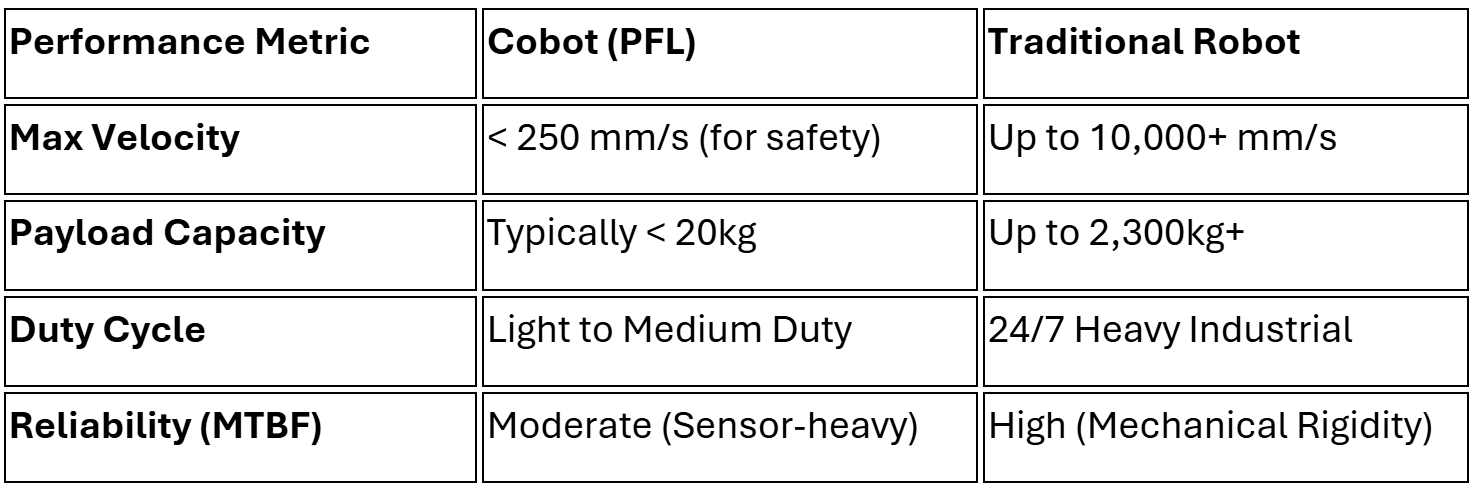
The Technical Trade-Off: Efficiency vs. Accessibility
While PFL allows for "cageless" operation, this safety comes at a direct cost to performance.
Navigating the Implementation Challenges
Our experience has highlighted several areas where the “Lego-fied” narrative of ease-of-use can conflict with industrial-grade requirements.
1. Integration Complexity and Fragmented Hardware
The perceived simplicity of cobots has led to a highly fragmented ecosystem. We often see over 100 different companies making third-party grippers or sensors for a single robot arm without a unified industry standard. This often leads to “integration creep” where a project’s timeline and budget extend far beyond the original estimate.
2. The Safety Misunderstanding
“Collaborative” is not a synonym for “safe in every application.” While the robot arm is force-limited, the tooling or the part it carries may not be. If a cobot is moving a sharp object, its PFL capability cannot prevent a puncture.
Sidebar: The 3-Point Risk Assessment Checklist
The Sharpness Test: Is the robot holding a tool or part with an edge? If yes, PFL is insufficient.
The Reach Test: Does the operator need to be in the zone while the robot is at full speed?
The Pinch Point Test: Are there any areas where a human could be trapped between the robot and a fixed object?
3. The True Cost of "Industrial-Grade"
We often see cobots marketed based on a low entry price for the arm alone. However, once you factor in custom end-of-arm-tooling (EOAT), fault handling, recovery protocols, and safety validation, a $35,000 arm can quickly become a $200,000 project.
Why Traditional Robots Often Win on ROI
For high-volume manufacturing, traditional robots remain the gold standard. They offer superior throughput and precision that drastically reduce the cost-per-part over millions of cycles. In applications where every second counts, the speed of traditional automation is the primary driver of profitability. These systems are engineered for the rigors of 24/7 heavy industrial use, providing a level of mechanical rigidity and sub-millimeter repeatability that lightweight collaborative arms struggle to match.
The Hybrid Alternative: Speed and Separation Monitoring (SSM)
Modern safety technology now offers a middle ground: Speed and Separation Monitoring.
By using industrial laser scanners or vision systems, a traditional robot can be programmed with dynamic safety zones. When a human is far away, the robot runs at maximum industrial speed. As a person approaches, the robot automatically slows to a safe collaborative speed. This "Hybrid" approach allows for maximum ROI while maintaining a collaborative-style footprint.
CFO SIDEBAR: Technical Checklist for Investment
If you are approving a capital expenditure for a cobot, ensure the proposal answers these three financial questions:
Has a full Risk Assessment been quoted? (Expect an unbudgeted $15k–$30k expense if this is missing).
What is the "Total System" price? (The arm hardware is usually only 20% of the total project cost).
Is the Cycle Time guaranteed? (PFL speed restrictions often lead to lower output than the business case requires).
A Word to the Wise
Before making an investment based on a sales pitch, consult with an experienced systems integrator. We want to ensure your investment is equipped for the job you actually need done. Our goal is to provide the most cost-effective, high-performance solution.
Arimation Robotics is proud to be your partner in custom automation.
Email info@arimationrobotics.com to schedule an initial conversation.